Aspectos básicos de la computación paralela.
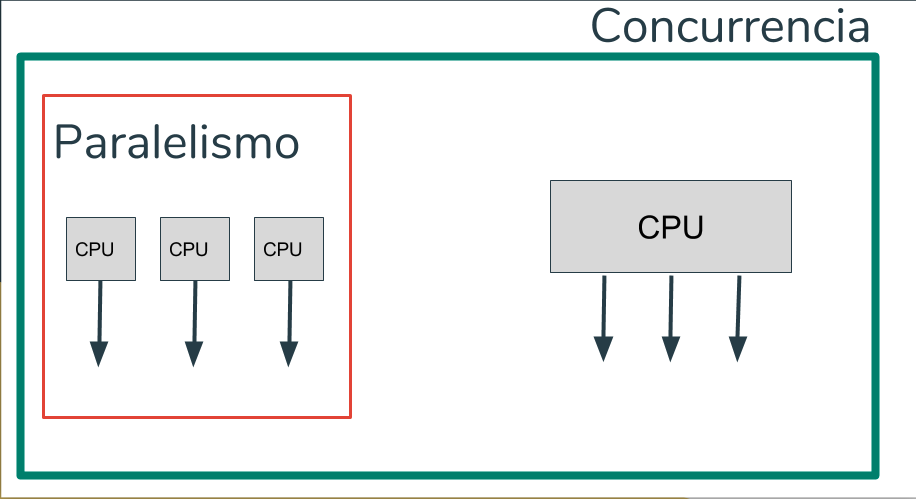
La computación paralela es una forma de cómputo en la que muchas instrucciones se ejecutan simultáneamente, operando sobre el principio de que problemas grandes, a menudo se pueden dividir en unos más pequeños, que luego son resueltos simultáneamente (en paralelo). Hay varias formas diferentes de computación paralela: paralelismo a nivel de bit, paralelismo a nivel de instrucción, paralelismo de datos y paralelismo de tareas. El paralelismo se ha empleado durante muchos años, sobre todo en la computación de altas prestaciones, pero el interés en ella ha crecido últimamente debido a las limitaciones físicas que impiden el aumento de la frecuencia. Como el consumo de energía y por consiguiente la generación de calor de las computadoras constituye una preocupación en los últimos años, la computación en paralelo se ha convertido en el paradigma dominante en la arquitectura de computadores, principalmente en forma de procesadores multinúcleo.
Tipos de computación paralela.
Paralelismo a nivel de bit.
Desde el advenimiento de la integración a gran escala (VLSI) como
tecnología de fabricación de chips de computadora en la década de
1970 hasta alrededor de 1986, la aceleración en la arquitectura de
computadores se lograba en gran medida duplicando el tamaño de la
palabra en la computadora, la cantidad de información que el
procesador puede manejar por ciclo. El aumento del tamaño de la
palabra reduce el número de instrucciones que el procesador debe
ejecutar para realizar una operación en variables cuyos tamaños son
mayores que la longitud de la palabra. Por ejemplo, cuando un
procesador de 8 bits debe sumar dos enteros de 16 bits, el
procesador primero debe adicionar los 8 bits de orden inferior de
cada número entero con la instrucción de adición, a continuación,
añadir los 8 bits de orden superior utilizando la instrucción de
adición con acarreo que tiene en cuenta el bit de acarreo de la
adición de orden inferior, en este caso un procesador de 8 bits
requiere dos instrucciones para completar una sola operación, en
donde un procesador de 16 bits necesita una sola instrucción para
poder completarla.
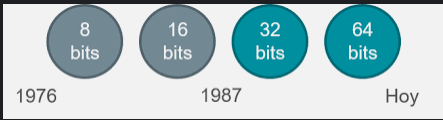
Históricamente, los microprocesadores de 4 bits fueron sustituidos
por unos de 8 bits, luego de 16 bits y 32 bits, esta tendencia general
llegó a su fin con la introducción de procesadores de 64 bits, lo que
ha sido un estándar en la computación de propósito general durante
la última década.
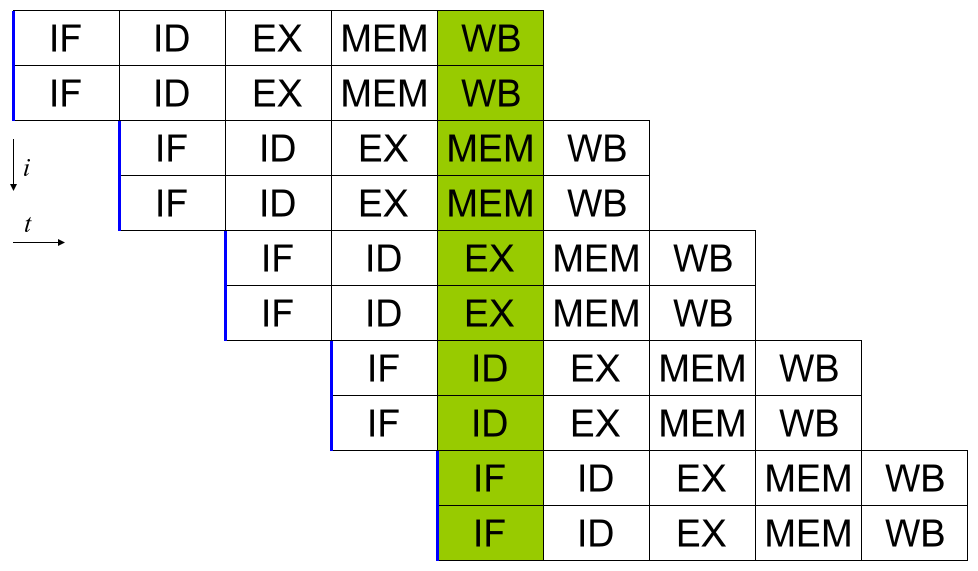
Los procesadores modernos tienen ''pipeline'' de instrucciones de varias etapas. Cada etapa en el pipeline corresponde a una acción diferente que el procesador realiza en la instrucción correspondiente a la etapa; un procesador con un pipeline de N etapas puede tener hasta n instrucciones diferentes en diferentes etapas de finalización. El ejemplo canónico de un procesador segmentado es un procesador RISC, con cinco etapas: pedir instrucción, decodificar, ejecutar, acceso a la memoria y escritura. El procesador Pentium 4 tenía un pipeline de 35 etapas.
El paralelismo de datos es el paralelismo inherente en programas con ciclos, que se centra en la distribución de los datos entre los diferentes nodos computacionales que deben tratarse en paralelo. "La paralelización de ciclos conduce a menudo a secuencias similares de operaciones —no necesariamente idénticas— o funciones que se realizan en los elementos de una gran estructura de datos". Muchas de las aplicaciones científicas y de ingeniería muestran paralelismo de datos. Una dependencia de terminación de ciclo es la dependencia de una iteración de un ciclo en la salida de una o más iteraciones anteriores. Las dependencias de terminación de ciclo evitan la paralelización de ciclos.
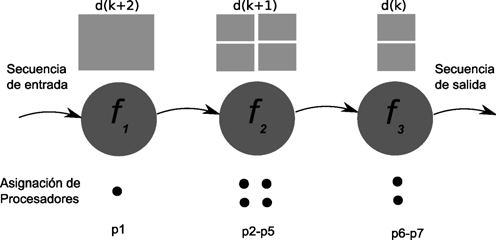
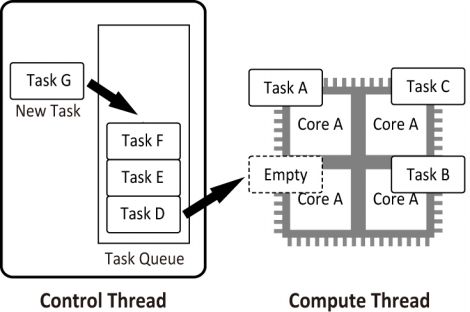
Paralelismo de tareas es un paradigma de la programación concurrente que consiste en asignar distintas tareas a cada uno de los procesadores de un sistema de cómputo. En consecuencia, cada procesador efectuará su propia secuencia de operaciones. En su modo más general, el paralelismo de tareas se representa mediante un grafo de tareas, el cual es subdividido en subgrafos que son luego asignados a diferentes procesadores. De la forma como se corte el grafo, depende la eficiencia de paralelismo resultante. La partición y asignación óptima de un grafo de tareas para ejecución concurrente es un problema NP-completo, por lo cual en la práctica se dispone de métodos heurísticos aproximados para lograr una asignación cercana a la óptima.
Clasificación.
Las computadoras paralelas se pueden clasificar de acuerdo con el
nivel en el que el hardware soporta paralelismo. Esta clasificación es
análoga a la distancia entre los nodos básicos de cómputo. Estos no
son excluyentes entre sí, por ejemplo, los grupos de
multiprocesadores simétricos son relativamente comunes.
Computación multinúcleo: un procesador multinúcleo es un
procesador que incluye múltiples unidades de ejecución
(núcleos) en el mismo chip. Un procesador multinúcleo puede
ejecutar múltiples instrucciones por ciclo de secuencias de
instrucciones múltiples.
Multiprocesamiento simétrico: un multiprocesador simétrico
(SMP) es un sistema computacional con múltiples
procesadores idénticos que comparten memoria y se conectan
a través de un bus. La contención del bus previene el escalado
de esta arquitectura.
Computación en clúster: un clúster es un grupo de
ordenadores débilmente acoplados que trabajan en estrecha
colaboración, de modo que en algunos aspectos pueden
considerarse como un solo equipo.
Procesamiento paralelo masivo: tienden a ser más grandes
que los clústeres, con «mucho más» de 100 procesadores. En
un MPP, cada CPU tiene su propia memoria y una copia del
sistema operativo y la aplicación.
Computación distribuida: la computación distribuida es la
forma más distribuida de la computación paralela. Se hace uso
de ordenadores que se comunican a través de la Internet para
trabajar en un problema dado.
Computadoras paralelas especializadas: dentro de la
computación paralela, existen dispositivos paralelos
especializados que generan interés. Aunque no son específicos
para un dominio, tienden a ser aplicables sólo a unas pocas
clases de problemas paralelos.
Cómputo reconfigurable con arreglos de compuertas
programables: el cómputo reconfigurable es el uso de un
arreglo de compuertas programables (FPGA) como
coprocesador de un ordenador de propósito general.
Cómputo de propósito general en unidades de
procesamiento gráfico (GPGPU): es una tendencia
relativamente reciente en la investigación de ingeniería
informática. Los GPUs son co-procesadores que han sido
fuertemente optimizados para procesamiento de gráficos por
computadora.
Circuitos integrados de aplicación específica: debido a que
un ASIC (por definición) es específico para una aplicación
dada, puede ser completamente optimizado para esa
aplicación. Como resultado, para una aplicación dada, un
ASIC tiende a superar a un ordenador de propósito general.
Procesadores vectoriales: pueden ejecutar la misma
instrucción en grandes conjuntos de datos. Tienen operaciones
de alto nivel que trabajan sobre arreglos lineales de números o
vectores.
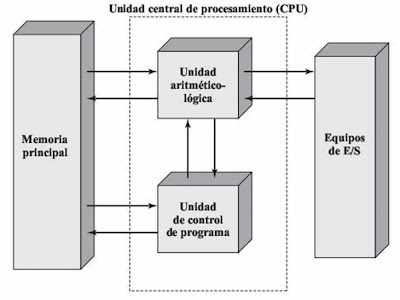
Arquitectura de computadoras secuenciales.
A diferencia de los sistemas combinacionales, en los sistemas
secuenciales, los valores de las salidas, en un momento dado, no
dependen exclusivamente de los valores de las entradas en dicho
momento, sino también dependen del estado anterior o estado
interno. El sistema secuencial más simple es el biestable, de los
cuales, el de tipo D (o cerrojo) es el más utilizado actualmente.
El sistema secuencial requiere de la utilización de un dispositivo de
memoria que pueda almacenar la historia pasada de sus entradas
(denominadas variables de estado) y le permita mantener su estado
durante algún tiempo, estos dispositivos de memoria pueden ser
sencillos como un simple retardador o celdas de memoria de tipo
DRAM, SRAM o multivibradores biestables también conocido
como Flip-Flop.
Tipos de sistemas secuenciales
En este tipo de circuitos entra un factor que no se había considerado
en los circuitos combinacionales, dicho factor es el tiempo, según
como manejan el tiempo se pueden clasificar en: circuitos
secuenciales síncronos y circuitos secuenciales asíncronos.
Circuitos secuenciales asíncronos.
En circuitos secuenciales asíncronos los cambios de estados ocurren
al ritmo natural asociado a las compuertas lógicas utilizadas en su
implementación, lo que produce retardos en cascadas entre los
biestables del circuito, es decir no utilizan elementos especiales de
memoria, lo que puede ocasionar algunos problemas de
funcionamiento, ya que estos retardos naturales no están bajo el
control del diseñador y además no son idénticos en cada compuerta
lógica.
Circuitos secuenciales síncronos.
Los circuitos secuenciales síncronos solo permiten un cambio de
estado en los instantes marcados o autorizados por una señal de
sincronismo de tipo oscilatorio denominada reloj (cristal o circuito
capaz de producir una serie de pulsos regulares en el tiempo), lo que
soluciona los problemas que tienen los circuitos asíncronos
originados por cambios de estado no uniformes dentro del sistema o
circuito.